
A Rover is a complex machine with many instruments for data collection mounted on it. These instruments work simultaneously to produce the desired results. Let us examine these components individually and how they work.
Cameras
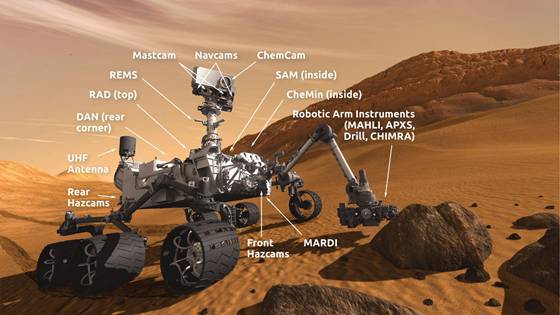
There are several cameras attached to the rover. These cameras take images and videos of the martian landscape for onward transmission to scientists here on earth. For instance, the MARDI or Mars Descent Imager provides scientists with geological data of the rover’s landing. While the MAHLI or Mars hand lens imager functions similarly to a hand lens, taking pictures of Martian samples as small as 12.5 microns.
Another camera located on the mast is the Rover Environmental Monitoring station or REMS. This instrument serves as a Martian weather station, measuring atmospheric parameters such as wind speed and humidity.
Analysis
The instruments for analyzing Martian samples on the rover include the SAM, CheMin, Alpha Particle X-ray Spectrometer, Dynamic Albedo of Neutrons, and Radiation Assessment Detector. These instruments analyze Martian rock and soil samples for signs of life.
For instance, the SAM, also known as Sample Analysis at Mars, analyzes Martian samples for elements such as Carbon, Hydrogen, and Oxygen. It also checks for carbon-containing compounds. The CheMin, also known as Chemistry and Mineralogy instrument, analyzes different minerals prevalent on Mars as well as their relative abundance.
On the other hand, the APXS or alpha particle x-ray spectrometer analyzes dirt and rocks for chemical elements while checking their abundance. Dynamic Albedo of Neutrons or DAN searches Mars for Ice and water-related minerals under the surface. At the same time, the RAD or Radiation Assessment Detector helps measure and identify radiation of different types on Mars, alerting astronauts to the level of radiation on Mars.
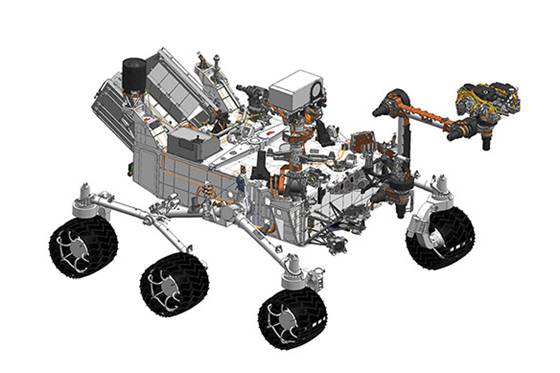
The rover is a vehicle with many components working in tandem. It has parts similar to what living creatures would require to stay alive. The components of a Mars Rover include:
1. Body
The body is the structure that encloses the rover’s interior and processing systems. Also known as a warm electronic box, this body is strong. It features a Rover Equipment deck, which houses the Rover mast and camera.
2. Brain
This is the computer module of the rover. Another name for the brain is the Rover Compute Element. To forestall or prevent mission failure, there are always two Rover Compute Elements within the rover’s body.
The RCE directs the engineering functions of the rover over two networks. This interface follows the standard aerospace industry design for aircraft, including airplanes and spacecraft. Aside from the engineering functions, the rover computes elements and directs the rover instruments regarding data exchange.
The rover’s brain functions similarly to a human brain in that it always checks the system to ensure the temperature is stable and adjusts accordingly when unstable. It also records power generated and stored throughout a Martian day while scheduling the start and completion of new activities.
Furthermore, the rover computes elements and also schedules and prepares communication sessions with local Mars orbiters and earth.
3. Cameras
There are 23 cameras on the rover: 9 engineering cameras, 7 science cameras, and 7 entry, descent, and landing cameras. These cameras function as the rover’s other senses and eyes. The entry, descent, and landing cameras record full-color videos as the rover makes its final descent to the Martian surface. Data provided by these cameras include.
- What occurs on Rover touch down;
- The exact position in the landing area where the rover touched down;
- Aerial view of the landing area before landing, providing insight into how to drive the rover;
- How much sand and rocks do the retro rockets blow into the atmosphere;
- Movement of the landing system as it touches down the surface;
- How the parachute deploys and operates in the Martian atmosphere.
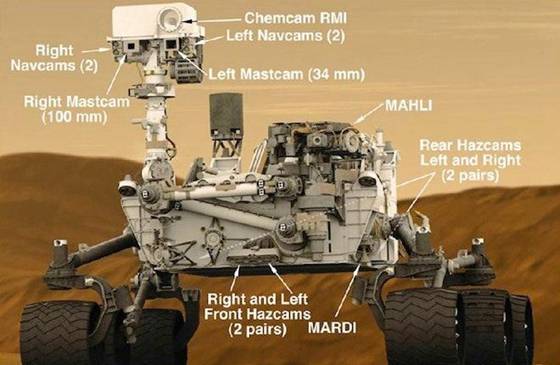
On the other hand, the engineering cameras provide much detailed information on the terrain around the rover. These cameras perform various functions, including measuring the ground around the rover to facilitate safe driving, supporting sample gathering, and monitoring rover hardware status.
There are three engineering cameras used on a Rover: Hazard Avoidance Cameras or HazCams, Navigation Cameras or Navcams, and CacheCam. The HazCams help the rover avoid hazards like coming in rocks, dunes, and trenches. There are two NavCams, which help the rover move independently, without human influence. On the other hand, the CacheCam takes pictures of samples during collection.
Asides from the Engineering cameras, there are also the science cameras like SuperCam, PIXL, SHERLOC, and WATSON. These cameras come into play during sample analysis and extraction. They also provide a better view of the Martian topography.
4. Ears
These rover’s ears come in the form of two microphones that enable scientists to listen to the sounds of Mars. There are two types of microphones on the Rover: SuperCam and EDL Microphones. The EDL microphone, also known as Enter, Descent, and Landing Microphone, helps record the sounds of landing.
The SuperCam microphone, on the other hand, comes with the SuperCam. The microphones help scientists listen to the SuperCam laser’s sound as it strikes the rock. The intensity of the sound is proportional to the rock’s relative hardness.
5. Legs and Wheels
The rover features six wheels. And each wheel has its motor. Also, the front and rear wheels have steering motors, allowing the rover to turn 360 degrees while in place, among other movements.
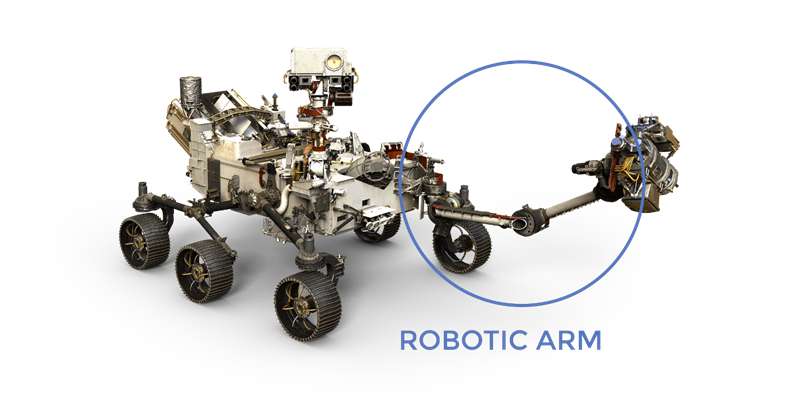
6. Arms
The Rover features a 7-foot-long robotic arm with a shoulder, elbow, and wrist for maximum extension and flexibility. With this arm, a Rover can work the same way a geologist would.
Main Material: Aluminum 7075
This material, often used in aerospace, has considerable fatigue strength. It is one of the strongest aluminum alloys, with strength comparable to many types of steel. Asides from strength, this alloy exhibits good ductility, making it ideal for high-stress structural applications like building the rover’s robotic arm.
Process: CNC Milling, Wire Cut EDM, etc
Made through CNC milling and Wire cut EDM, the rover’s robotic arm contains parts with high dimensional accuracy. The reason is that while creating complex shapes and patterns, this machining process produces parts with high precision and a high-quality surface texture.
Surface Treatment: Anodizing
Opting for Anodizing as the surface treatment for the rover’s robotic arm is no mistake, as this surface treatment improves its corrosion resistance. Also, with this treatment, there is no risk of chalking, which might introduce foreign matter to Mars and influence the result of the analysis made on the Red planet.
Features and Composition: Sample Equipment on the Hand, Drill System, and Dust Removal Tool
The robotic arm works similarly to the human hand, which allows the rover to maneuver instruments for collecting Martian samples. The arm ends in a turret with several tools with a 360-degree turning range.
There are five main devices mounted on the Turret: Alpha particle X-ray spectrometer, Mars Hand Lens Imager, CHIMRA, Drill system, and dust removal system. While the first two analyze samples on contact, CHIMRA (Collection and Handling for In-situ Rock Analysis) collect and transfer samples to SAM and CheMin for Analysis. The rover arm uses the dust removal tool to remove dust from rocks or clean its observation tray.
Design for Manufacturing, also known as DFM, helps optimize part production. Carrying out a DFM analysis before manufacturing parts makes it easier to detect challenges in a manufacturing technique or process before committing resources to that particular technique. This helps save costs in the long run while ensuring product parts are of optimum quality.
Here we will review the actual rover robotic arm part DFM. But because of NDA, we only show typical examples of this case study in this section.
Here are examples of the Design for Manufacturing of typical rover robotic arm parts.
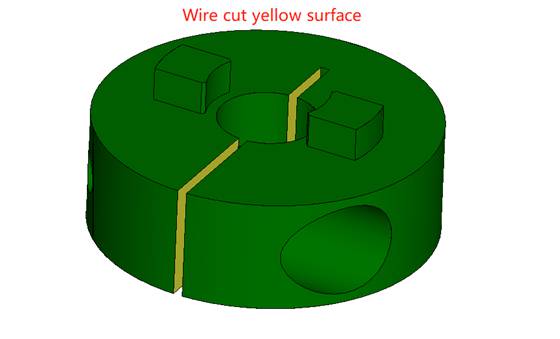
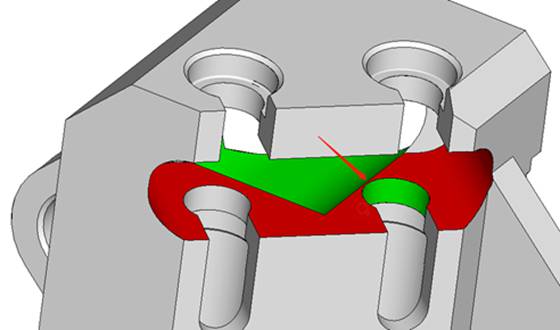
Perpendicularity
The above image depicts a part of a robotic arm machined using wire EDM cut technology. Due to the use of this process, perpendicularity tolerance on the wire cut surface is an important consideration. Perpendicularity is a dimensional tolerance that relates to the angle between two surfaces. It specifies the maximum angular deviation from true perpendicularity or 90 degrees that can occur between two surfaces.
Therefore, the perpendicularity of the rover robot arm part of the above part can only be 0.02. The reason for this is that some distortion occurs when using wire-cutting technology, which can lead to slight deviations.
Wall Thickness
Wall Thickness in machining is a measure of the thickness of a component or part’s walls. It is an important factor to consider when designing components as it will determine their overall strength, rigidity, and durability. In addition, the proper wall thickness will help ensure that parts are safe and able to withstand heavy loads without warping or cracking.
When designing the above part, it is best to increase its thickness to 0.7mm at the least. In the image above, the area where the arrow is pointing is too thin, with a design thickness of only 0.1mm. This could consequently result in an easy-to-break wall.
Material Specification
In this case, aluminum 7075 is the ideal material for use in machining this robotic arm part. Furthermore, it is one of the highest strength aluminum alloys, making it perfect for high-stress applications. This alloy contains 90% aluminum, 5.6% Zinc, 2.5% Magnesium, and 1.6% Copper.
Post-treatment Options
Type II anodizing aluminum is recommended for the parts requiring surface treatment in this case study. It is a process that involves submerging aluminum in sulfuric acid, which causes the formation of an aluminum oxide layer on the surface and within the material. This layer has the useful property of being a great electrical insulator.
It features an Anodize Per Mil-A-8625. This surface finish is usually thicker than other types of oxide layers. This makes it ideal for mars due to its harsh environmental conditions.
Another benefit of using the Type II anodizing surface finish is that it makes the aluminum 7075 a great electrical insulator. Asides from preventing conductivity, this oxide layer protects the metal from corrosion, making it the ideal post-treatment for rover robotic arm parts.
The environmental conditions on Mars are quite different from that prevalent on earth. They are infinitely harsher, with daily changes in temperature up to 100 degrees Celsius. Designing the rover, engineers had to consider the difference in conditions. Here are some challenges they encountered with designing and the solutions they proffered.
High Precision and Tight Tolerance
The rover is a complex robot with large parts. Engineering large parts with tight tolerance are challenging. However, regardless of the size, rover parts still require high precision and tight tolerances for optimal functionality. So engineers had to employ different precision machining techniques, including CNC machining and wire-cut EDM, to achieve this.
The Difference in Environmental Condition
The environmental condition on Mars is harsher than that on earth. With temperatures ranging from -195°C (-320°F) during the polar night, to 27°C (81°F) in the daytime at the equator, it is an extreme place for anything. The atmosphere of Mars is much thinner than Earth’s, with only 1% of the atmospheric pressure at sea level.
Additionally, the average global albedo (reflection of sunlight) of Mars is 0.25, meaning that the planet absorbs about 75 percent of all the light that falls on it, further contributing to its extreme temperatures.
Therefore, All components of the rover must be able to withstand the rigors of the environment. Manufacturers need to fully consider the use of various parts of the scenario, the material, processing, post-treatment methods, assembly, and transportation to set strict standards.
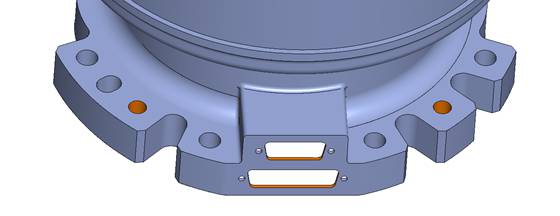
Part Attributes
The rover parts have different attributes. Some parts need to be conductive, while some are insulators. This posed a challenge to engineers, and the solution proffered was polishing some parts (marked orange above) after the workpiece oxidation treatment. Polishing operations here are precise.
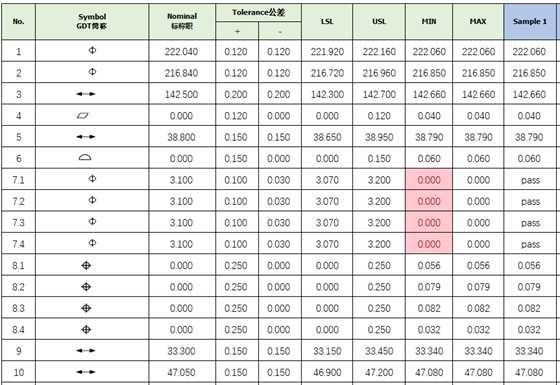
Parts Complexity and Accuracy Requirements
The rover parts are complex because each part has its accuracy requirement. However, regardless of the time consumed by accuracy report testing, engineers needed to provide detailed data for each part’s accuracy.


